01-cabinet-coke
03-plate-tissue
sim1
01-coke-lemon
03-sandwich-plate
sim2
01-lemon-coke
03-tissue-gum
(Task switch evaluation videos of SwitchVLA)
The SwitchVLA Policy
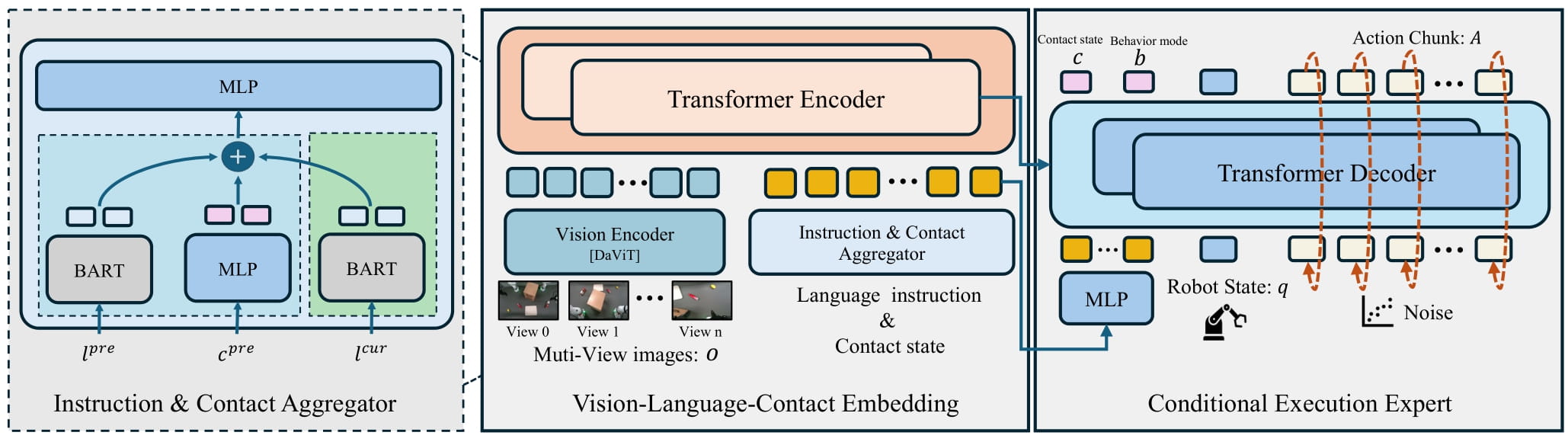
SwitchVLA establishes a unified architecture for robust and instruction-consistent task execution. The architecture consists of two core components: (i) Visual-Language-Contact (VLC) Embedding Module encodes visual, language, and contact cues into unified representations. (ii) Conditional Execution Expert decodes behavior-aware actions conditioned on the current multimodal embedding.
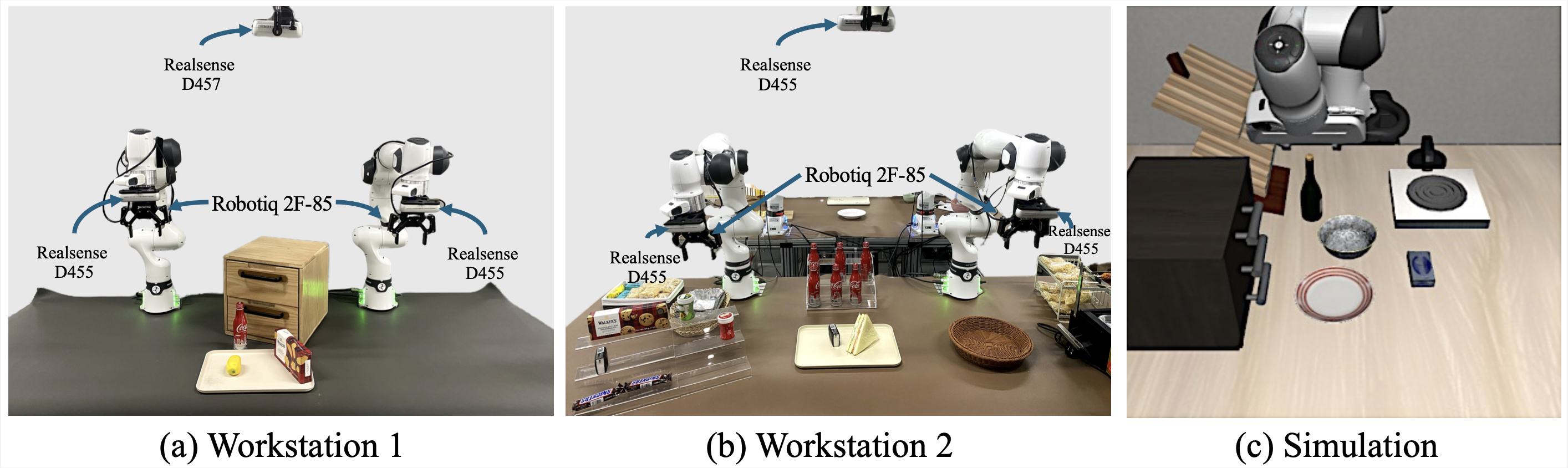
The real-robot dataset was collected via human teleoperation on two dual-armed Franka Emika Panda workstations . For each trajectory, recordings include data from two wrist-mounted cameras, one third-person RGB camera, and the robots’ proprioceptive state sensors. The simulation dataset is drawn from the LIBERO benchmark’s simulation task suite GOAL .
Experiments
Tasks Switch Evaluations on Robot Platforms
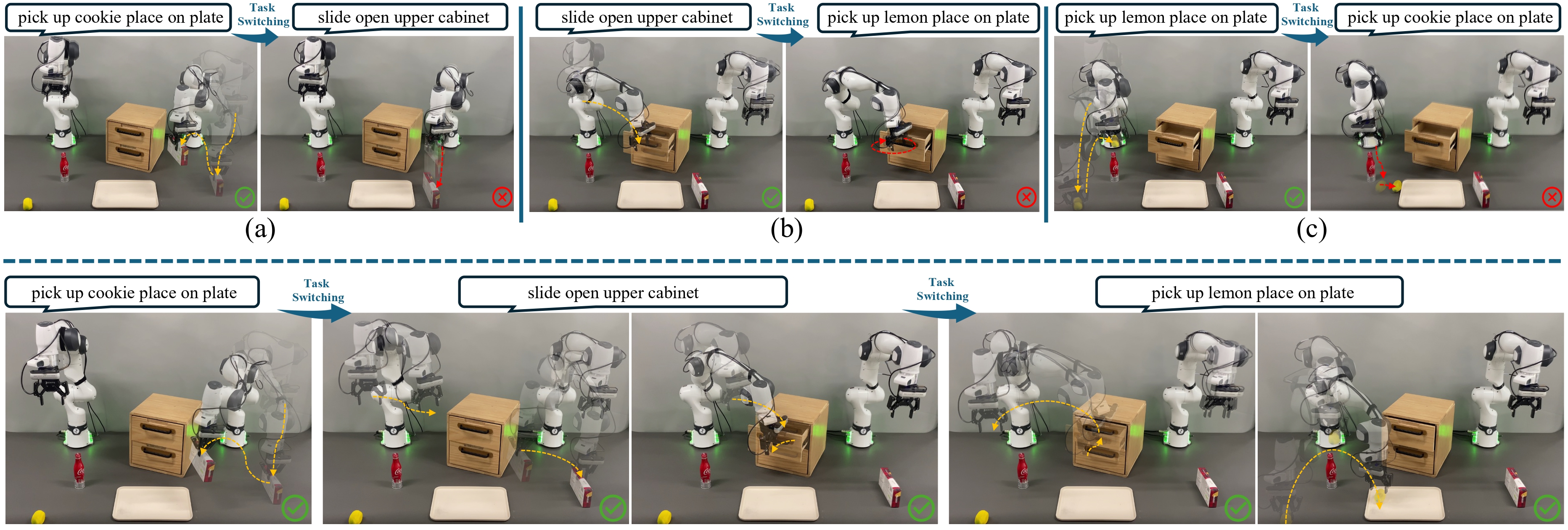
SwitchVLA Long Sequence Task Switching
The following videos showcase the SwitchVLA long sequence switching performance on real-world and simulation platforms.
Real-World Workstation 1
pick up lemon place on plate→pick up cookie place on plate→pick up coke bottle place on plate→pick up lemon place on plate→pick up coke bottle place on plate→slide open upper cabinet
Real-World Workstation 2
pick up red gum place on plate→pick up sandwich place on plate→push plate to customer→pick up tissue place on plate→pick up sandwich place on plate→pick up red gum place on plate
Simulation
put the cream cheese in the bowl→put the wine bottle on top of the cabinet→put the bowl on the stove→put the bowl on the plate→put the bowl on top of the cabinet→turn on the stove
Pairwise Task Switching Comparisons with State-of-the-Art Models
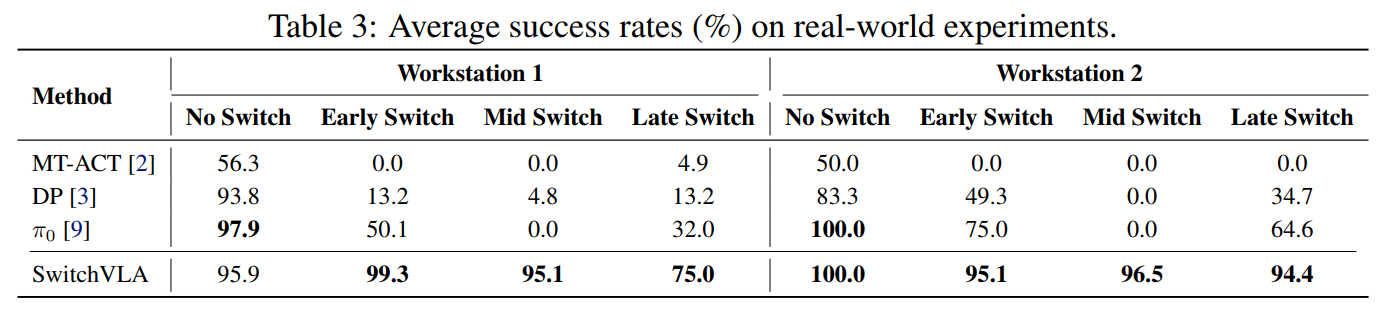
In real-world experiments, We evaluate SwitchVLA against MT-ACT, Diffusion Policy (DP), and π0. π0 is a re-implementation based on the original paper.
For simulation, we compare SwitchVLA with π0 and OpenVLA-OFT.
Workstation 1
Mid-Switch: pick up coke bottle place on plate → pick up lemon place on plate
SwitchVLA
✅
Diffusion Policy (DP)
❌
MT-ACT
❌
Late-Switch: pick up cookie place on plate → pick up lemon place on plate
SwitchVLA
✅
Diffusion Policy (DP)
❌
π0
❌
Mid-Switch: slide open upper cabinet → pick up coke bottle place on plate
SwitchVLA
✅
Diffusion Policy (DP)
❌
π0
❌
Early-Switch: pick up lemon place on plate → pick up coke bottle place on plate
SwitchVLA
✅
Diffusion Policy (DP)
❌
MT-ACT
❌
Workstation 2
Mid-Switch: pick up sandwich place on plate → push plate to customer
SwitchVLA
✅
Diffusion Policy (DP)
❌
MT-ACT
❌
Early-Switch: pick up tissue place on plate → pick up red gum place on plate
SwitchVLA
✅
Diffusion Policy (DP)
❌
MT-ACT
❌
Mid-Switch: push plate to customer → pick up tissue place on plate
SwitchVLA
✅
π0
❌
MT-ACT
❌
Late-Switch: pick up red gum place on plate → push plate to customer
SwitchVLA
✅
DP
❌
MT-ACT
❌
Simulation
Mid-Switch: put the bowl on the plate → turn on the stove
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Mid-Switch: put the bowl on the stove → put the wine bottle on the rack
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Late-Switch: put the bowl on top of the cabinet → turn on the stove
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Late-Switch: put the cream cheese in the bowl → put the wine bottle on top of the cabinet
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Mid-Switch: put the wine bottle on top of the cabinet → turn on the stove
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Late-Switch: put the bowl on the stove → put the wine bottle on the rack
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Mid-Switch: put the bowl on top of the cabinet → turn on the stove
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Late-Switch: put the bowl on the plate → turn on the stove
SwitchVLA
✅
Openvla-oft
❌
π0
❌
The following videos showcase the SwitchVLA long sequence switching performance on real-world and simulation platforms.
pick up lemon place on plate→pick up cookie place on plate→pick up coke bottle place on plate→pick up lemon place on plate→pick up coke bottle place on plate→slide open upper cabinet
pick up red gum place on plate→pick up sandwich place on plate→push plate to customer→pick up tissue place on plate→pick up sandwich place on plate→pick up red gum place on plate
put the cream cheese in the bowl→put the wine bottle on top of the cabinet→put the bowl on the stove→put the bowl on the plate→put the bowl on top of the cabinet→turn on the stove
In real-world experiments, We evaluate SwitchVLA against MT-ACT, Diffusion Policy (DP), and π0. π0 is a re-implementation based on the original paper.
For simulation, we compare SwitchVLA with π0 and OpenVLA-OFT.
Workstation 1
Mid-Switch: pick up coke bottle place on plate → pick up lemon place on plate
SwitchVLA
✅
Diffusion Policy (DP)
❌
MT-ACT
❌
Late-Switch: pick up cookie place on plate → pick up lemon place on plate
SwitchVLA
✅
Diffusion Policy (DP)
❌
π0
❌
Mid-Switch: slide open upper cabinet → pick up coke bottle place on plate
SwitchVLA
✅
Diffusion Policy (DP)
❌
π0
❌
Early-Switch: pick up lemon place on plate → pick up coke bottle place on plate
SwitchVLA
✅
Diffusion Policy (DP)
❌
MT-ACT
❌
Workstation 2
Mid-Switch: pick up sandwich place on plate → push plate to customer
SwitchVLA
✅
Diffusion Policy (DP)
❌
MT-ACT
❌
Early-Switch: pick up tissue place on plate → pick up red gum place on plate
SwitchVLA
✅
Diffusion Policy (DP)
❌
MT-ACT
❌
Mid-Switch: push plate to customer → pick up tissue place on plate
SwitchVLA
✅
π0
❌
MT-ACT
❌
Late-Switch: pick up red gum place on plate → push plate to customer
SwitchVLA
✅
DP
❌
MT-ACT
❌
Simulation
Mid-Switch: put the bowl on the plate → turn on the stove
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Mid-Switch: put the bowl on the stove → put the wine bottle on the rack
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Late-Switch: put the bowl on top of the cabinet → turn on the stove
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Late-Switch: put the cream cheese in the bowl → put the wine bottle on top of the cabinet
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Mid-Switch: put the wine bottle on top of the cabinet → turn on the stove
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Late-Switch: put the bowl on the stove → put the wine bottle on the rack
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Mid-Switch: put the bowl on top of the cabinet → turn on the stove
SwitchVLA
✅
Openvla-oft
❌
π0
❌
Late-Switch: put the bowl on the plate → turn on the stove